
Veröffentlicht: 4. August 2011
Kategorie: Fachartikel
Der Motor bildet die Schnittstelle zwischen dem elektrischen und dem mechanischen Bereich. Er befindet sich in einem Umfeld, das mit der angetriebenen Last verbunden ist und von dem er nicht getrennt werden kann.
Einleitung
Der Motor bildet die Schnittstelle zwischen dem elektrischen und dem mechanischen Bereich. Er befindet sich in einem Umfeld, das mit der angetriebenen Last verbunden ist und von dem er nicht getrennt werden kann. Andererseits kann der Motor inneren mechanischen Belastungen unterworfen sein, da er bewegliche Teile enthält. Ein einziger ausgefallener Motor kann einen ganzen Prozess aufs Spiel setzen. Moderne Motoren haben ausgesprochen optimierte Eigenschaften, die wenig Spielraum für einen Betrieb außerhalb ihrer normalen Daten bieten. Deshalb handelt es sich um einen verhältnismäßig empfindlichen Verbraucher, der sorgfältig geschützt werden muss.
Fehlerarten
Motoren werden von den folgenden Fehlerarten betroffen:
Der Motor bildet die Schnittstelle zwischen dem elektrischen und dem mechanischen Bereich. Er befindet sich in einem Umfeld, das mit der angetriebenen Last verbunden ist und von dem er nicht getrennt werden kann. Andererseits kann der Motor inneren mechanischen Belastungen unterworfen sein, da er bewegliche Teile enthält. Ein einziger ausgefallener Motor kann einen ganzen Prozess aufs Spiel setzen. Moderne Motoren haben ausgesprochen optimierte Eigenschaften, die wenig Spielraum für einen Betrieb außerhalb ihrer normalen Daten bieten. Deshalb handelt es sich um einen verhältnismäßig empfindlichen Verbraucher, der sorgfältig geschützt werden muss.
Fehlerarten
Motoren werden von den folgenden Fehlerarten betroffen:
- Mit der angetriebenen Last zusammenhängende Fehler.
- Speisungsfehler.
- Motorinterne Fehler.
- Überlast.
Wenn die verbrauchte Leistung höher ist als die Nennleistung, entsteht im Motor ein Überstrom und eine Erhöhung der Verluste und damit eine Erhöhung der Temperatur.
- Zu lange dauernde und zu häufige Anläufe.
Der Anlauf eines Motors bewirkt hohe Überströme, die nur zulässig sind, wenn sie von kurzer Dauer sind. Wenn die Anläufe zu häufig sind oder zu lange dauern, weil der Unterschied zwischen dem Motordrehmoment und dem Lastdrehmoment zu klein ist, wird die damit verbundene Erwärmung zu hoch.
- Blockierung.
Dabei handelt es sich um einen plötzlichen Stillstand, der seine Ursache in der angetrieben Last hat. Der Motor nimmt den Anlaufstrom auf und bleibt im Stillstand blockiert. Er wird nicht mehr belüftet und erwärmt sich sehr schnell.
- Leerlaufen einer Pumpe.
Dies bewirkt einen Leerlauf des Motors, was keine direkten nachteiligen Folgen hat. Die Pumpe wird hingegen sehr schnell beschädigt.
- Leistungsrückfluss.
Dieser Fehler tritt in der Folge auf eine Spannungsabsenkung ein, wenn ein durch die Trägheit der Last angetriebener Synchronmotor Energie in das Netz einspeist. Insbesondere wenn die normale Speisung des Netzes abschaltet, kann der Synchronmotor die Spannung auf unerwünschte Weise aufrechterhalten und die übrigen parallelgeschalteten Lasten speisen.
- Spannungsabsenkung.
Diese verursacht eine Abnahme des Motordrehmomentes und der Drehzahl. Diese Verlangsamung bewirkt eine Erhöhung des Stroms und der Verluste. Somit tritt eine abnormale Erwärmung auf.
- Unsymmetrie.
Die Drehstromspeisung kann aus den folgenden Gründen unsymmetrisch sein:- Die Energiequelle (Transformator oder Generator) liefert keine symmetrische Dreiphasenspannung.
- Die übrigen Verbraucher stellen keine symmetrische Last dar, wodurch das Versorgungsnetz unsymmetrisch wird.
- Der Motor läuft an zwei Phasen, weil eine Sicherung durchgebrannt ist. Die Unsymmetrie der Speisung bewirkt
- Kurzschluss zwischen Phasen.
Dieser ist je nach dem Ort des Fehlers in der Wicklung mehr oder weniger stark und hat bedeutende Schäden zur Folge.
- Körperschluss.
Die Stärke des Fehlerstroms hängt von der Sternpunktbehandlung im Versorgungsnetz und vom Ort des Fehlers in der Wicklung ab. Nach einem Kurzschluss zwischen Phasen und einem Körperschluss muss der Motor neu gewickelt werden. Zudem kann ein Körperschluss irreparable Schäden am magnetischen Kreis verursachen.
- Verlust des Synchronbetriebs.
Dieser Fehler betrifft Synchronmotoren, die infolge eines Ausfalls der Erregung den Synchronismus verlieren und als Asynchronmotoren laufen, wobei jedoch der Rotor eine starke Erwärmung erfährt, da er nicht für einen solchen Betrieb dimensioniert ist.
Motorschutzeinrichtungen
Überlast
Diese wird durch eine der folgenden Schutzeinrichtungen überwacht:
Dieselbe Funktion stellt diese beiden Schutzbedürfnisse sicher. Es handelt sich um einen unverzögerten Ansprechwert, den man auf einen Wert unterhalb des Anlaufstroms einstellt und der nach einer Verzögerung nach dem Einschalten des Motors berücksichtigt wird. Diese Verzögerung wird auf einen Wert eingestellt, der größer oder gleich der normalen Anlaufdauer ist.
Zu häufige Anläufe
Die entsprechende Schutzeinrichtung reagiert auf die Anzahl Anläufe innerhalb einer bestimmten Zeit oder auf den zeitlichen Abstand zwischen diesen Anläufen.
Leerlaufen einer Pumpe
Dieser Zustand wird durch einen Minimalstromschutz mit stromunabhängiger Verzögerung erfasst, der reinitialisiert wird, wenn der Strom den Wert Null erreicht (wenn der Motor stillsteht).
Leistungsrückfluss
Dieser wird durch einen richtungsabhängigen Wirkleistungsrückflussschutz festgestellt.
Spannungsabsenkung
Diese wird durch einen verzögerten Minimalspannungsschutz überwacht. Die Einstellungen für den Spannungsansprechwert und die Verzögerung werden so gewählt, dass sie in Bezug auf die Kurzschlussschutzeinrichtungen des Netzes selektiv sind und normale Spannungsabfälle, wie sie zum Beispiel beim Anlauf eines Motors auftreten, tolerieren. Diese Schutzeinrichtung ist oft für mehrere Motoren, die von derselben Schalttafel aus gesteuert werden, gemeinsam.
Unsymmetrie
Dieser Schutz wird durch eine vom Strom abhängige oder unabhängige Erfassung der Gegenkomponente des Stroms gewährleistet. Kurzschluss zwischen Phasen
Dieser wird mit einem verzögerten Maximalstromschutz erfasst. Der Einstellwert des Ansprechstroms ist höher oder gleich dem Anlaufstrom, und die Verzögerung wird sehr kurz eingestellt, da sie lediglich die Schutzeinrichtung unempfindlich gegen die ersten Spitzen des Einschaltstroms machen soll. Wenn das verwendete Schaltgerät ein Schütz ist, wird dieses mit Sicherungen verbunden, die den Kurzschlussschutz gewährleisten.
Für große Motoren wird ein Hochimpedanz oder Prozent-Differentialschutz verwendet (Abb. 1).
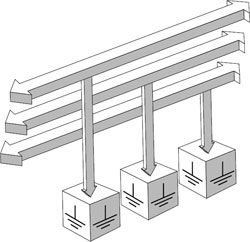
Durch eine entsprechende Schaltung der sternpunktseitigen Anschlüsse und die Verwendung von drei Summenstromwandlern ermöglicht ein einfacher Maximalstromschutz eine empfindliche und stabile Erfassung interner Fehler (Abb. 2).
Körperschluss
Der Schutz hängt von der Sternpunktbehandlung ab. Zur Begrenzung von Schäden am magnetischen Kreis ist eine hohe Empfindlichkeit erforderlich.
Ausfall der Erregung
(bei Synchronmotoren). Dieser wird durch einen verzögerten Blindleistungsrückflussschutz erfasst.

Überlast
Diese wird durch eine der folgenden Schutzeinrichtungen überwacht:
- Maximalstromschutz mit stromabhängiger Verzögerung.
- Thermisches Abbild. Das thermische Abbild bringt die Erwärmung aufgrund des durchfließenden Stroms ins Spiel.
- Temperaturfühler.
Dieselbe Funktion stellt diese beiden Schutzbedürfnisse sicher. Es handelt sich um einen unverzögerten Ansprechwert, den man auf einen Wert unterhalb des Anlaufstroms einstellt und der nach einer Verzögerung nach dem Einschalten des Motors berücksichtigt wird. Diese Verzögerung wird auf einen Wert eingestellt, der größer oder gleich der normalen Anlaufdauer ist.
Zu häufige Anläufe
Die entsprechende Schutzeinrichtung reagiert auf die Anzahl Anläufe innerhalb einer bestimmten Zeit oder auf den zeitlichen Abstand zwischen diesen Anläufen.
Leerlaufen einer Pumpe
Dieser Zustand wird durch einen Minimalstromschutz mit stromunabhängiger Verzögerung erfasst, der reinitialisiert wird, wenn der Strom den Wert Null erreicht (wenn der Motor stillsteht).
Leistungsrückfluss
Dieser wird durch einen richtungsabhängigen Wirkleistungsrückflussschutz festgestellt.
Spannungsabsenkung
Diese wird durch einen verzögerten Minimalspannungsschutz überwacht. Die Einstellungen für den Spannungsansprechwert und die Verzögerung werden so gewählt, dass sie in Bezug auf die Kurzschlussschutzeinrichtungen des Netzes selektiv sind und normale Spannungsabfälle, wie sie zum Beispiel beim Anlauf eines Motors auftreten, tolerieren. Diese Schutzeinrichtung ist oft für mehrere Motoren, die von derselben Schalttafel aus gesteuert werden, gemeinsam.
Unsymmetrie
Dieser Schutz wird durch eine vom Strom abhängige oder unabhängige Erfassung der Gegenkomponente des Stroms gewährleistet. Kurzschluss zwischen Phasen
Dieser wird mit einem verzögerten Maximalstromschutz erfasst. Der Einstellwert des Ansprechstroms ist höher oder gleich dem Anlaufstrom, und die Verzögerung wird sehr kurz eingestellt, da sie lediglich die Schutzeinrichtung unempfindlich gegen die ersten Spitzen des Einschaltstroms machen soll. Wenn das verwendete Schaltgerät ein Schütz ist, wird dieses mit Sicherungen verbunden, die den Kurzschlussschutz gewährleisten.
Für große Motoren wird ein Hochimpedanz oder Prozent-Differentialschutz verwendet (Abb. 1).
Durch eine entsprechende Schaltung der sternpunktseitigen Anschlüsse und die Verwendung von drei Summenstromwandlern ermöglicht ein einfacher Maximalstromschutz eine empfindliche und stabile Erfassung interner Fehler (Abb. 2).
Körperschluss
Der Schutz hängt von der Sternpunktbehandlung ab. Zur Begrenzung von Schäden am magnetischen Kreis ist eine hohe Empfindlichkeit erforderlich.
Ausfall der Erregung
(bei Synchronmotoren). Dieser wird durch einen verzögerten Blindleistungsrückflussschutz erfasst.
Beispiele für den Motorschutz

Von einem Schütz oder Leistungsschalter geschalteter Asynchronmotor
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Anzahl Anläufe
- Minimalstrom

Asynchronmotor hoher Leistung
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Anzahl Anläufe
- Minimalstrom

Synchronmotor hoher Leistung
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Anzahl Anläufe
- Minimalstrom
Einstellangaben
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Minimalstrom
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Anzahl Anläufe
- Minimalstrom
Zusätzlich je nach Art der Last:
- Zu lange dauernder Anlauf und Blockierung des Rotors
- Anzahl Anläufe
- Minimalstrom
Einstellangaben
| Fehlerart |
Einstellungen |
| Überlast |
|
| Phasenunsymmetrie, -ausfall und -umkehr |
|
| Kurzschluss |
|
| Statormasse |
|
| Zu lange dauernder Anlauf Blockierung des Rotors |
|
| Spannungsabsenkung |
|
| Wirkleistungsrückfluss |
|
| Ausfall der Erregung |
|